 |
BattleBot IronEagle2001の開発状況 |
|
|
1.デザイン(2001.08.22追加) 2.シミュレーション(2001.05) 3.無線システム(2001.06) 4.モーター(2001.08.22) 今後の予定 5.モータードライバ 6.制御ソフト
|
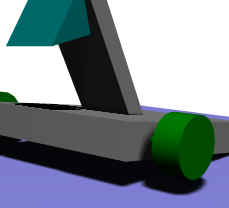
1.デザイン アメリカの皆さんは個性があり、自分のロボットに特徴を持っています。我々も見習ってアイアンイーグルのデザインは大幅に変更せず、IronEagle2000のイメージを残して開発を進めることにしました。 IronEagle2001の設計をスタートしました。下はイメージデザインです。どこまでこのデザインに近づけられるが課題です。自動車でもデザインどおりには行きません。
ついでにIronEagle2002を予告します。2002年は歩行型で行きたいと思っています。ちょっと気がはやいですがNR-oneが歩き始めたので大型のロボットを作って見たくなりました。
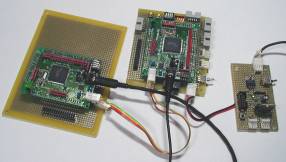
2.シミュレーション MSC Nastranの体験版を入手しましたので、ロボットのイメージを作ってみました。このソフトは非常に良くできています。機構、強度などの解析が可能です。ロボット開発には不可欠のツールでしょう。体験版は以下より入手できます。 3.無線システム ラジコンの使用では複雑なコントロールや混信の問題が避けられないのでIronEagle2000で当初使用したようにデジタル通信を使うことで検討を進めてきました。ただし微弱電波では通信距離の問題があります。また通信速度にも限界がありました。そこで今回は写真のGIGA
WAVEを使用することにしました。
通信距離は屋外で1.5km,屋内で86m、通信速度は1Mbps(BPSK)です。これにSH2などのマイコンを接続し、オリジナルの通信プロトコルを搭載します。写真はテスト中のGIGA
WAVEとSH2ボードです。
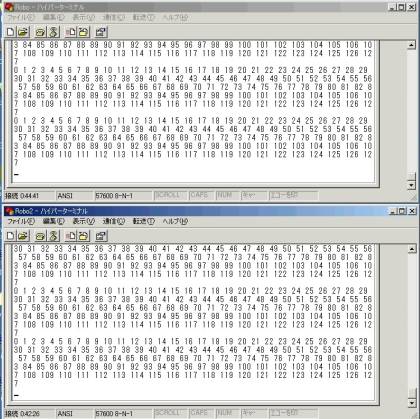
まずはSH2-7045を2台使って通信速度は1Mbps(BPSK)のクロック同期モードの実験です。1Mbpsが限界です。RAM搭載モードではキャッシュと最適化でやっと1Mbpsの通信速度が得られました。
下の画面はハイパーターミナルを使用して転送実験の画面です。128byteデータの連続送信と受信を繰り返しています。文字化けなどはありません。2Mbpsではオーバーランエラーが発生しました。
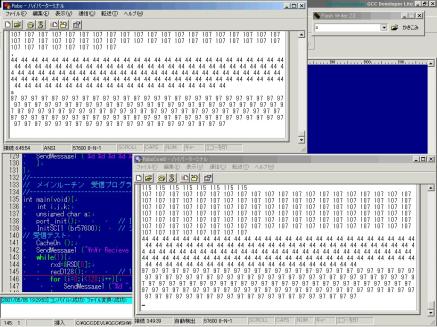
送信と受信の画面 次にGIGA WAVEとの接続です。GIGA
WAVEとSH-7045をクロック同期で接続します。GIGA
WAVEではプリアンブルにより送受信の確立を待ちます。送受信が確立したあと、データの送受信を行います。この判断の遅れがビット落ちをおこします。この対応に苦慮しました。
写真のように2台のSH-7045とGIGA
WAVEを接続し、2つのRS232Cポートを使っての実験です。押されたキーの値を連続128バイト送ります。(上の画面)下の画面はそれを受信したところです。まったく問題なく動作します。
アイアンイーグルのコントロールでは送信データの頭にパスワードを入れます。続いてコマンドが送られますがパスワードが不一致の場合はコマンドを実行しません。コマンドの後には必要に応じて、スピードや首、頭の角度などのデータが追加されます。
発注しておいた80V500Wのモータをついに入手しました。IronEagle2000の5倍のパワーです。これでUSロボット達と対等に戦えそうです。
500Wのモーター
|